結論:概ね満足できる剛性のハードウェアが作成できたけれど改善の余地がある。
■改善すべき点
- タイミングベルトの緩み
- 平行移動するステージの上下振動
- 2020のアルミフレームの乗せるだけでは、ステッピングモータを動かした際に振動が激しい
■改善すべき点画像

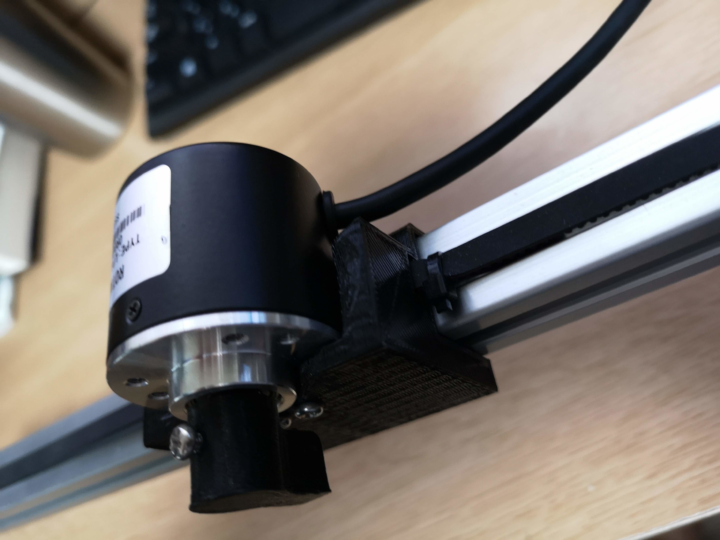
タイミングベルトの緩み
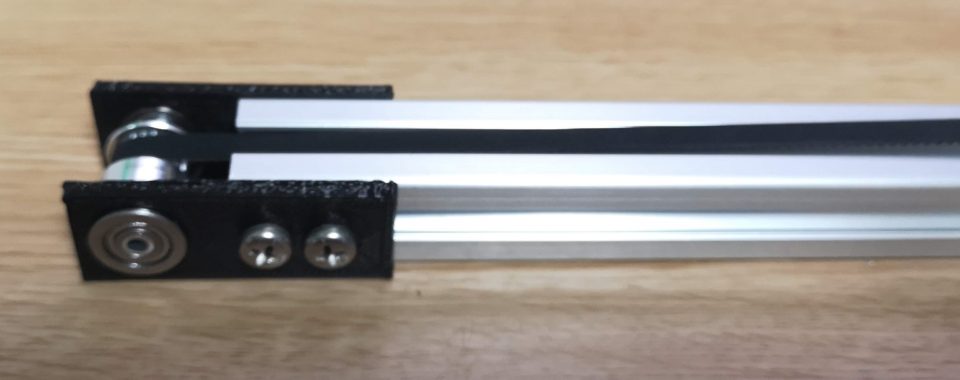
平行移動ステージ
エンコーダテスト(動画)
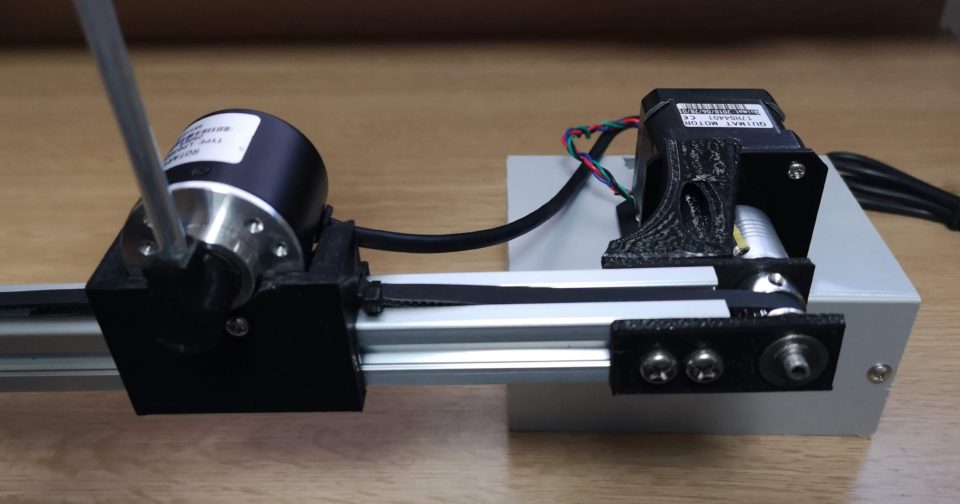
ロータリーエンコーダ(600パルス、AB二相、NPNオープンコレクタ)の動作チェック
記録
2020アルミフレームの長さは50cm








 二足歩行ロボット
二足歩行ロボット結論:概ね満足できる剛性のハードウェアが作成できたけれど改善の余地がある。
■改善すべき点
■改善すべき点画像
タイミングベルトの緩み
平行移動ステージ
ロータリーエンコーダ(600パルス、AB二相、NPNオープンコレクタ)の動作チェック
2020アルミフレームの長さは50cm

コメント